
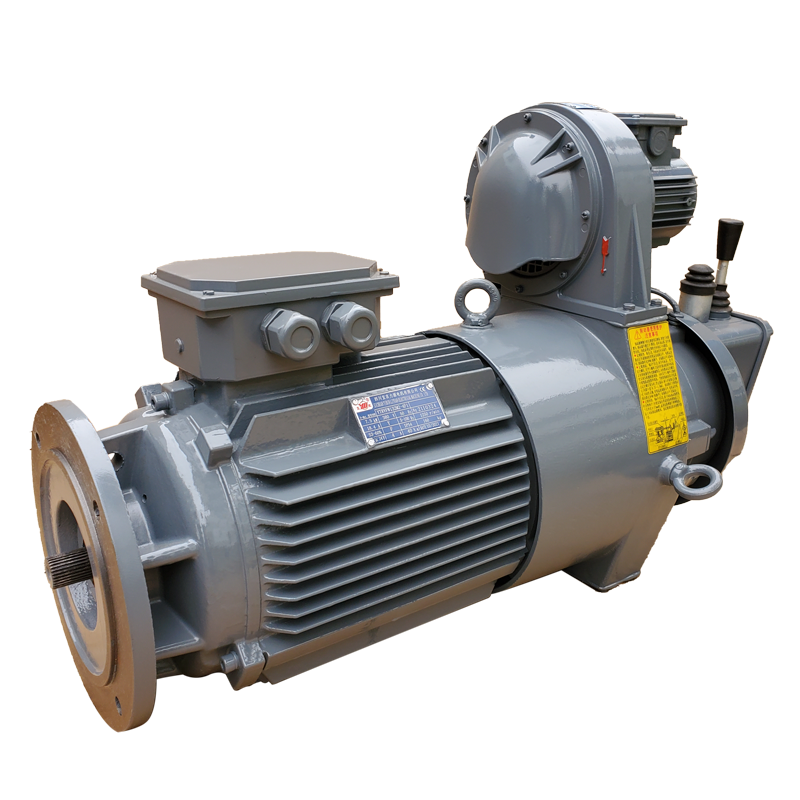
Поворотный частотно-регулируемый электродвигатель
Когда говорят поворотный частотно-регулируемый электродвигатель, многие сразу представляют себе просто мотор с частотником и редуктором. Но это как раз тот случай, где кроется главный подводный камень — думать, что это просто сборка из готовых узлов. На деле, если взять обычный асинхронный двигатель, поставить на него преобразователь частоты и механический поворотный узел, получится громоздкая, ненадёжная система с проблемами по моменту и точности позиционирования. Именно здесь и проявляется разница между каталогной картинкой и машиной, которая должна годами работать, скажем, в поворотном устройстве крана или конвейерной линии.
Конструктивная интеграция — где начинаются реальные сложности
Основная ошибка — рассматривать электропривод как три отдельных блока: двигатель, ЧРП и редуктор/поворотный механизм. В спецификациях всё выглядит гладко: двигатель выдаёт номинальный момент, частотник его регулирует, механизм поворачивает. Но в момент пуска, особенно под нагрузкой, или при необходимости точной остановки в заданном положении, эта сборка начинает жить своей жизнью. Я помню проект, где заказчик сэкономил, купив отдельно двигатель и частотник разных марок. В теории протоколы связи были стандартными. На практике — задержки сигнала, рывки при разгоне и перегрев обмотки на низких скоростях. Пришлось переделывать, интегрируя систему от одного поставщика, который отвечал за весь кинематический и электрический контур.
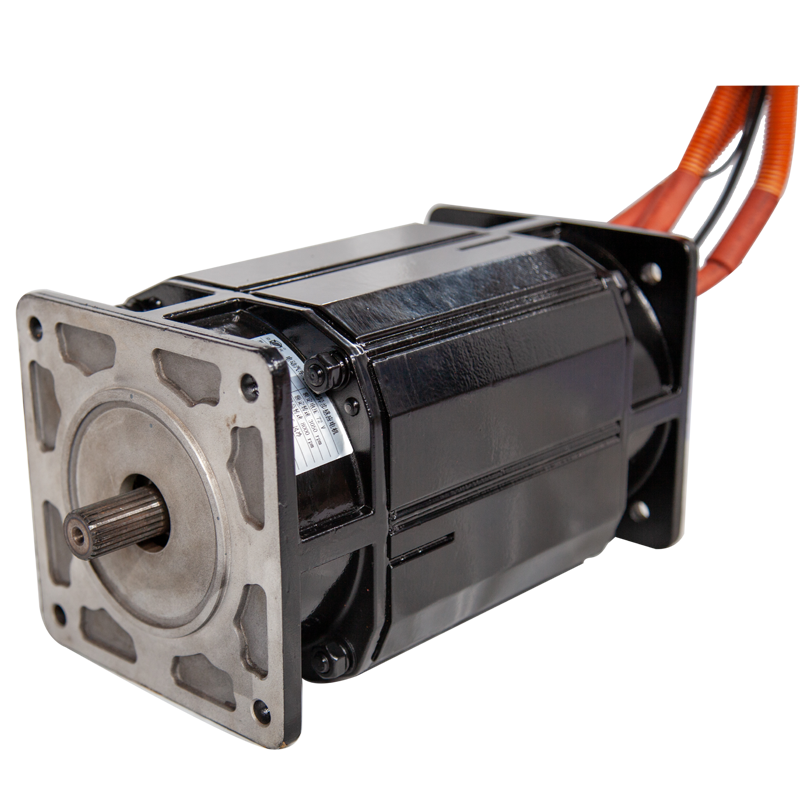
Ключевой момент — это встроенный датчик положения (энкодер) и его связь с контроллером ЧРП. Недостаточно иметь высокоточный резольвер. Его сигнал должен обрабатываться с минимальной задержкой, а алгоритм управления в частотнике — быть адаптированным именно для поворотного движения, а не для простого насосного режима. Часто видишь, как в проекте указан многооборотный энкодер, но разрядность его интерфейса не согласована с возможностями ЦПУ преобразователя частоты. В итоге точность позиционирования ?уплывает?.
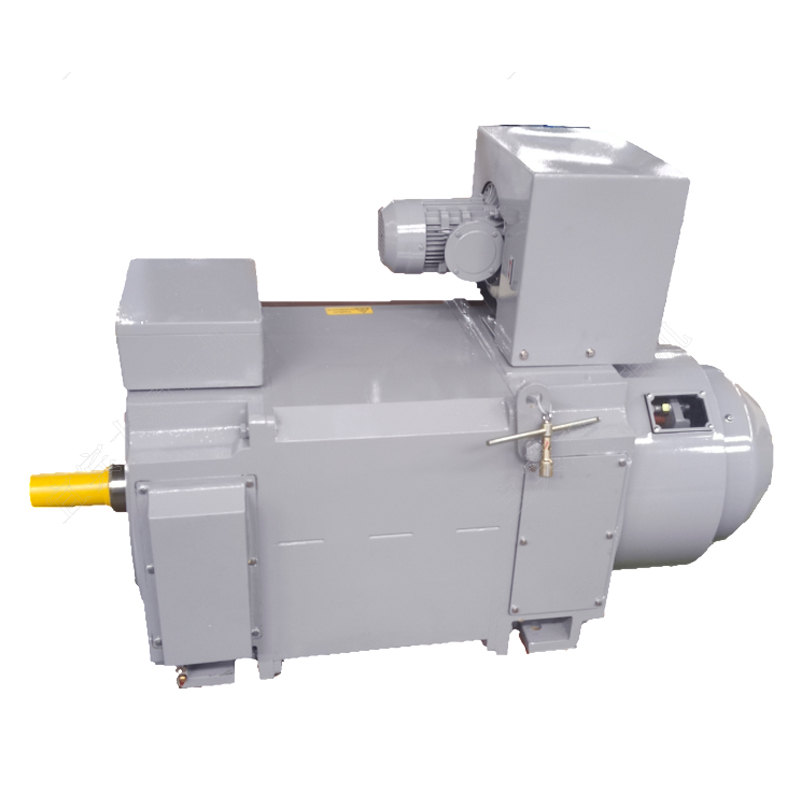
Здесь стоит отметить подход некоторых производителей, которые изначально проектируют поворотный частотно-регулируемый электродвигатель как единый агрегат. Например, в ассортименте ООО Сычуань Ибинь Лиюань Электрический мотор (ранее Сычуань Ибинь завод электродвигателей) есть серии, где двигатель, тормоз, редуктор и датчик положения скомпонованы в одном корпусе, а управление завязано на фирменные частотные преобразователи. Это не просто удобство монтажа. Такая интеграция позволяет производителю калибровать систему на стенде, оптимизировать алгоритмы управления под инерцию именно этого узла и гарантировать заявленные динамические характеристики. Информацию по таким комплексным решениям можно найти на их специализированном ресурсе https://www.liyuandj.ru.
Тепловой режим и моментные характеристики — поле для компромиссов
Ещё один практический аспект, о котором редко пишут в брошюрах, — это тепловыделение при длительной работе на низких оборотах. Поворотный электродвигатель в крановых механизмах или поворотных платформах часто работает в режиме старт-стоп с длительными паузами в заторможенном состоянии, но под нагрузкой. Вентилятор на валу двигателя при низкой скорости не обеспечивает должного охлаждения. Стандартное решение — двигатель с принудительным независимым охлаждением (система IC 416). Но это увеличивает габариты и требует дополнительного питания. В одном из наших случаев для малогабаритной роботизированной сборочной ячейки это стало проблемой.
Пришлось глубоко погружаться в каталоги и технические отчёты по нагреву. Выяснилось, что многие производители, включая упомянутый выше завод, имеющий историю с 1965 года как предприятие по производству специальных двигателей, предоставляют детальные кривые зависимости момента от времени работы для различных режимов S3, S4, S5. Это не просто сухие цифры. Для инженера это инструмент для выбора: можно ли использовать стандартный двигатель с запасом по моменту, чтобы он не грелся на низких скоростях, или сразу закладывать специсполнение.
Здесь же встаёт вопрос о моменте на валу. Для поворотных механизмов критичен пусковой и минимально-рабочий момент на всём диапазоне регулирования. Частотник, конечно, позволяет поддерживать момент за счёт векторного управления. Но если сам двигатель не рассчитан на длительную работу в зоне 1-5 Гц с полным моментом, изоляция обмотки быстро состарится. Опыт показывает, что для надёжной работы стоит выбирать двигатель с номинальным моментом на 20-25% выше расчётного для механизма. Да, это дороже и тяжелее, но это страхует от внезапных отказов через год-два эксплуатации.
Вопросы совместимости и настройки на объекте
Идеально спроектированный и подобранный агрегат может столкнуться с проблемами на пусконаладке. Электромагнитная совместимость — классика жанра. Длинные кабели между частотником и поворотным электродвигателем — источник помех, которые влияют на сигналы энкодера и датчиков. Использование экранированных кабелей с правильным заземлением — обязательное, но не всегда достаточное условие. В условиях цеха с массой другого силового оборудования иногда приходится экспериментировать с дросселями на выходе ЧРП и ферритовыми кольцами.
Настройка ПИД-регуляторов в контуре положения и скорости — это почти искусство. Паспортные рекомендации — лишь отправная точка. На реальном механизме с люфтами, упругостью и переменной нагрузкой эти параметры приходится подбирать. Я помню, как мы потратили два дня, чтобы устранить автоколебания стрелы манипулятора при точном позиционировании. Оказалось, что нужно было не увеличивать коэффициент усиления по скорости, а, наоборот, снизить его и увеличить время интегрирования в контуре положения. Это был неочевидный вывод, который пришёл только после анализа логов осциллографа и данных частотника.
В этом контексте ценность приобретает техническая поддержка производителя, которая понимает не просто характеристики двигателя, а его поведение в связке с конкретной механикой. Компании с большим опытом в специализированном машиностроении, такие как ООО Сычуань Ибинь Лиюань Электрический мотор, часто могут предоставить типовые настройки частотника для своих двигателей в различных поворотных применениях, что экономит массу времени наладчикам.
Надёжность и обслуживание в долгосрочной перспективе
Любой инженер-эксплуатационщик скажет, что главное — как система ведёт себя не на первой неделе, а через несколько тысяч рабочих циклов. Для частотно-регулируемого поворотного привода ключевые точки износа — это подшипниковые узлы двигателя и редуктора, работающие в режиме знакопеременных радиальных нагрузок, и тормозная система.
Тормоз — отдельная история. Он должен срабатывать чётко и удерживать нагрузку в любом положении. Но если он постоянно включён в течение длительных пауз, а отпускается только для короткого поворота, есть риск ?прикипания? колодок или якоря. В некоторых проектах мы переходили на тормоза с ручным растормаживанием для сервисных целей, а также закладывали периодический (раз в смену) контрольный цикл срабатывания тормоза по таймеру, чтобы предотвратить залипание.
Подшипники. Казалось бы, стандартный узел. Но вибрации от ШИМ-сигнала частотника создают дополнительные высокочастотные нагрузки. Для ответственных применений стоит рассматривать двигатели со специальными подшипниками, защищёнными от протекания токов (например, с изолирующим покрытием на внешнем кольце или со встроенным щёточным узлом для отвода токов). Это не прихоть, а необходимость для предотвращения выкрашивания дорожек качения из-за электрической эрозии.
Именно долгосрочная надёжность становится тем фактором, который оправдывает выбор проверенного поставщика, а не самого дешёвого варианта. Предприятие, которое, как Сычуань Ибинь Лиюань, работает с 1965 года и было назначенным производителем спецдвигателей для министерства, обычно имеет отработанные конструктивные решения именно для таких тяжёлых режимов работы, что в итоге снижает общую стоимость владения.
Выводы и неочевидные рекомендации
Итак, что в сухом остатке? Поворотный частотно-регулируемый электродвигатель — это не продукт для выбора по одной лишь таблице мощностей и оборотов. Это система, требующая комплексного взгляда на электромеханику, управление и условия эксплуатации.
Первое — не экономьте на интеграции. Лучше рассматривать готовый приводной комплекс от одного производителя, который несёт ответственность за совместимость всех компонентов. Второе — всегда запрашивайте и изучайте не только каталоги, но и технические отчёты по тепловым и моментным характеристикам в повторно-кратковременных режимах. Третье — закладывайте время и бюджет на квалифицированную пусконаладку, включая тонкую подстройку регуляторов под конкретную механику.
И последнее, что приходит с опытом: иногда правильнее выбрать двигатель на ступень мощнее и дороже, но с запасом по моменту и улучшенным охлаждением. Это страховка от непредвиденных перегрузок и гарантия того, что через несколько лет вам не придётся менять весь узел из-за выгоревшей обмотки или разбитых подшипников. В конечном счёте, надёжность и минимальное время простоя — вот истинные критерии выбора, которые и определяют успех проекта с таким, казалось бы, стандартным, но коварным узлом, как поворотный частотно-регулируемый электропривод.
Соответствующая продукция
Соответствующая продукция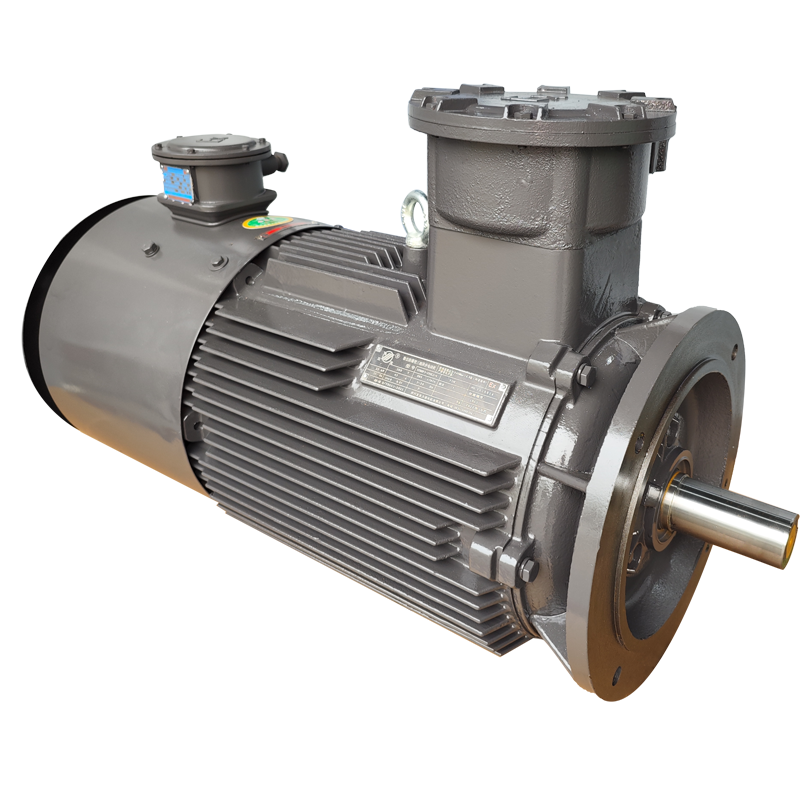





Самые продаваемые продукты
Самые продаваемые продукты-
 Двигатель серии YV
Двигатель серии YV -
 Трехфазный асинхронный двигатель с вращательным моментом для башенных кранов серии YTLEJ
Трехфазный асинхронный двигатель с вращательным моментом для башенных кранов серии YTLEJ -
 Трехфазный асинхронный двигатель с регулируемой частотой и торможением серии YVFE3
Трехфазный асинхронный двигатель с регулируемой частотой и торможением серии YVFE3 -
 Трехфазный асинхронный двигатель с регулируемой частотой вращения башенного крана серии YTRVF
Трехфазный асинхронный двигатель с регулируемой частотой вращения башенного крана серии YTRVF -
 Трехфазный асинхронный двигатель с переменной амплитудой и частотой серии YTDVF для башенных кранов
Трехфазный асинхронный двигатель с переменной амплитудой и частотой серии YTDVF для башенных кранов -
 Многоскоростной трехфазный асинхронный двигатель башенного крана серии YZTD
Многоскоростной трехфазный асинхронный двигатель башенного крана серии YZTD -
 Электромагнитный тормоз серии LVF(E) с регулируемой частотой вращения, трехфазный асинхронный двигатель для подъема квадратов
Электромагнитный тормоз серии LVF(E) с регулируемой частотой вращения, трехфазный асинхронный двигатель для подъема квадратов -
 Мостовой кран-редуктор серии YZPE2-132-4B
Мостовой кран-редуктор серии YZPE2-132-4B -
 Преобразование частоты подъема башенного крана серии YZPE2 (торможение) трехфазный асинхронный двигатель
Преобразование частоты подъема башенного крана серии YZPE2 (торможение) трехфазный асинхронный двигатель -
 Трехфазный асинхронный двигатель переменной частоты с поворотным механизмом башенного крана серии YTRVFW
Трехфазный асинхронный двигатель переменной частоты с поворотным механизмом башенного крана серии YTRVFW -
 Автомобильный двигатель серии TYQ112
Автомобильный двигатель серии TYQ112 -
 Многоскоростной трехфазный асинхронный двигатель башенного крана серии YZTD(E)
Многоскоростной трехфазный асинхронный двигатель башенного крана серии YZTD(E)
Связанный поиск
Связанный поиск- Редукторные двигатели для мостовых кранов
- Китайские производители двигателей YBX3
- Китайские заводы по производству трехфазных асинхронных двигателей IE4
- Производители газовых двигателей для угольных шахт в Китае
- Китайские заводы по производству двигателей YVF3
- Китайские заводы по производству двигателей YFB4
- Основные покупатели двигателей VFD из Китая
- Высокоэффективные трехфазные асинхронные двигатели цены в Китае
- Ведущие покупатели низковольтных трехфазных асинхронных двигателей в Китае
- Взрывозащищенный электроприводный двигатель