
Зачем на двигателе устанавливают энкодер?
2026-04-20
В процессе работы двигателя осуществляется мониторинг в режиме реального времени таких параметров, как ток, частота вращения и относительное положение по окружности вала, что позволяет определять состояние самого двигателя и приводного оборудования, а также осуществлять управление рабочим режимом двигателя и оборудования в режиме реального времени, обеспечивая тем самым реализацию многих специальных функций, таких как сервоуправление и регулирование скорости. Использование датчика в качестве измерительного элемента не только значительно упрощает измерительную систему, но и обеспечивает высокую точность, надежность и функциональность.
Энкодер — это вращающийся датчик, преобразующий физические величины положения и перемещения вращающихся деталей в последовательность цифровых импульсных сигналов, которые регистрируются и обрабатываются системой управления, после чего выдается ряд команд, регулирующих рабочий режим оборудования. Если энкодер сочетается с зубчатой рейкой или винтовой парой, его также можно использовать для измерения физических величин положения и перемещения деталей, совершающих прямолинейное движение.

Датчики используются в системах обратной связи по выходным сигналам электродвигателей, а также в измерительном и управляющем оборудовании. Внутри датчика имеются две основные части: оптический диск и приемник. Параметры изменения света, возникающие при вращении оптического диска, преобразуются в соответствующие электрические параметры, которые после предварительного усиления и обработки сигнала в преобразователе частоты выводятся в виде сигнала, управляющего силовыми элементами.
Как правило, датчик вращения может передавать только сигнал скорости, который после сравнения с заданным значением поступает в исполнительный блок частотно-регулируемого преобразователя, что позволяет регулировать скорость двигателя.
В зависимости от принципа действия датчики можно разделить на оптические, магнитные, индукционные и емкостные. В зависимости от метода шкалирования и формы выходного сигнала их можно разделить на три типа: инкрементные, абсолютные и гибридные.
У инкрементального энкодера положение определяется количеством импульсов, отсчитываемых от нулевой метки; он преобразует перемещение в периодический электрический сигнал, а затем преобразует этот сигнал в счетные импульсы, причем величина перемещения выражается количеством импульсов; у абсолютного энкодера положение определяется показанием выходного кода, причем показание выходного кода для каждого положения в пределах одного оборота является уникальным, и даже при отключении питания сохраняется однозначное соответствие между показанием и фактическим положением. Таким образом, при повторном включении питания инкрементального энкодера показания положения остаются актуальными; каждое положение абсолютного энкодера соответствует определенному цифровому коду, поэтому его показания зависят только от начального и конечного положений измерения, а не от промежуточного процесса измерения.

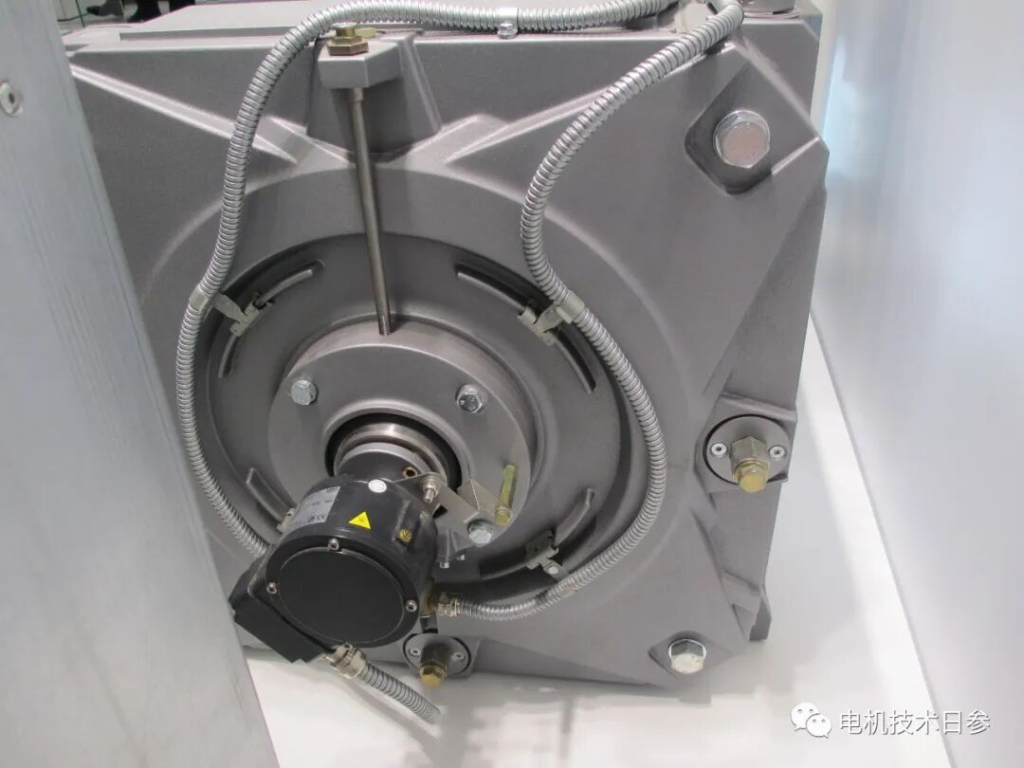
Датчик положения, выступающий в качестве устройства сбора информации о рабочем состоянии двигателя, соединяется с двигателем посредством механической установки; в большинстве случаев для этого требуется установить на двигателе кронштейн датчика и соединительный вал. Для обеспечения эффективности и безопасности работы двигателя и системы сбора данных ключевым моментом в процессе изготовления является соблюдение требований к соосности соединительного вала датчика и главного вала.